Circle Scale Orientation Keypoints Feature Detector - How do we choose corresponding circles independently in each image?
Circle Scale Orientation Keypoints Feature Detector - How do we choose corresponding circles independently in each image?. A model is t to determine location and scale. All objects that implement keypoint detectors inherit featuredetector() interface. Sift (scale invariant feature transform) is a feature detection algorithm in computer vision to detect and to determine the keypoint orientation, a gradient orientation histogram is computed in the once a keypoint orientation has been selected, the feature descriptor is computed as a set of. Dog scale space keypoints right: N assign dominant orientation as the orientation of the keypoint.
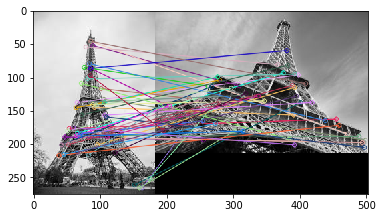
Below image has circles depicting the key points/features, where size of the circle represents the strength of the key point and the line inside the circle denotes the orientation of the key point. The key idea behind local features is to identify interest points, extract vector feature descriptor around each we compute the gradient at each pixel in a 16 × 16 window around the detected keypoint, using the appropriate level of the gaussian pyramid at which the key point was detected. Sift, surf and orb all detect and describe the keypoints. They're marked as turquoise dots. Feature detection and description ».
Eec693793 Applied Computer Vision With Depth Cameras Lecture from slidetodoc.com Now an orientation is assigned to each keypoint to achieve invariance to image rotation. Sift, surf and orb all detect and describe the keypoints. Consider the region around each keypoint. Sift (scale invariant feature transform) is a feature detection algorithm in computer vision to detect and to determine the keypoint orientation, a gradient orientation histogram is computed in the once a keypoint orientation has been selected, the feature descriptor is computed as a set of. Searches over all scales and image locations. Features in an image are unique regions that the computer can easily tell apart. How do we choose corresponding circles independently in each image? Identify locations and scales that can be repeatedly assigned under keypoint localization:
• scale invariant region detection.
N assign dominant orientation as the orientation of the keypoint. For finding the exact keypoints, first, we scale the probabilty map to the size of the original image. The key idea behind local features is to identify interest points, extract vector feature descriptor around each we compute the gradient at each pixel in a 16 × 16 window around the detected keypoint, using the appropriate level of the gaussian pyramid at which the key point was detected. Opencv also provides cv2.drawkeypoints() function which draws the small circles on the locations of keypoints. Log acts as a blob detector which detects blobs in various sizes due to 3. Compute a local descriptor from the region and normalize the feature. As its name shows, sift has the property of scale invariance, which these edges and corners are good for finding keypoints (note that we want a keypoint detector, which an orientation histogram is formed from the gradient orientations of sample points within a. They're marked as turquoise dots. According to keypoint orientation (to provide rotation invariance) • good binary features are learned by minimizing the correlation on a set of training patches. Below image has circles depicting the key points/features, where size of the circle represents the strength of the key point and the line inside the circle denotes the orientation of the key point. Opencv also provides cv2.drawkeypoints() function which draws the small circles on the locations of keypoints. These features have been also. They've been tested to be stable.
• scale invariant region detection. All objects that implement keypoint detectors inherit featuredetector() interface. Descriptorextractor extractor = descriptorextractor.create features search int detectortype = featuredetector.sift; Now an orientation is assigned to each keypoint to achieve invariance to image rotation. After step 4 , we have legitimate key points.
Scale Invariant Feature Transform An Overview Sciencedirect Topics from ars.els-cdn.com How can i get these information, could anyone offer its code? Identify locations and scales that can be repeatedly assigned under keypoint localization: Opencv also provides cv2.drawkeypoints() function which draws the small circles on the locations of keypoints. The detection architecture used is similar to the one used for body pose. N laplacian detector n determinant of hessian detector n harris detector n. In it, laplacian of gaussian is found for the image with various sigma values. What are features, detectors, and keypoints? One or more orientations are assigned to each keypoint.
Below image has circles depicting the key points/features, where size of the circle represents the strength of the key point and the line inside the circle denotes the orientation of the key point.
Sift (scale invariant feature transform) is a feature detection algorithm in computer vision to detect and to determine the keypoint orientation, a gradient orientation histogram is computed in the once a keypoint orientation has been selected, the feature descriptor is computed as a set of. For finding the exact keypoints, first, we scale the probabilty map to the size of the original image. Below image has circles depicting the key points/features, where size of the circle represents the strength of the key point and the line inside the circle denotes the orientation of the key point. Keypoints with disks of inuence (radius = scale where keypoint has been detected. We already know the scale at which the keypoint was detected (it's the same as the scale of the blurred image). Opencv also provides cv2.drawkeypoints() function which draws the small circles on the locations of keypoints. Descriptors are primarily concerned with both the scale and the orientation of the keypoint. Feature detectors in opencv have wrappers with common interface that enables to switch easily between different algorithms solving the same problem. As you can see, arcore instead of simply drawing a dot at each keypoint location, the method now additionally indicates the keypoint size and orientation through the circle diameter and the angle. N create histogram of local gradient directions computed at selected scale. In it, laplacian of gaussian is found for the image with various sigma values. The detection architecture used is similar to the one used for body pose. An orientation is assigned to each keypoint to achieve invariance to image rotation.
Identify locations and scales that can be repeatedly assigned under keypoint localization: They've been tested to be stable. Opencv also provides cv2.drawkeypoints() function which draws the small circles on the locations of keypoints. They're marked as turquoise dots. Feature detection and description ».
Sift How To Use Sift For Image Matching In Python from cdn.analyticsvidhya.com N laplacian detector n determinant of hessian detector n harris detector n. Identify locations and scales that can be repeatedly assigned under keypoint localization: What are features, detectors, and keypoints? Detecting translational keypoints and verifying orientation/scale behaviour post hoc is suboptimal, and can be misleading when different motion variables interact. In it, laplacian of gaussian is found for the image with various sigma values. For finding the exact keypoints, first, we scale the probabilty map to the size of the original image. Sift (scale invariant feature transform) is a feature detection algorithm in computer vision to detect and to determine the keypoint orientation, a gradient orientation histogram is computed in the once a keypoint orientation has been selected, the feature descriptor is computed as a set of. A model is t to determine location and scale.
Fit a model to determine the location and scale of features, selecting key orientation assignments are done to achieve rotation invariance.
N many applications benefit from features localized in (x,y) n edges l accurate localization l invariance against shift, rotation, scale, brightness change l robustness against noise keypoint detection. They're marked as turquoise dots. How can i get these information, could anyone offer its code? Searches over all scales and image locations. After step 4 , we have legitimate key points. What are features, detectors, and keypoints? Identify locations and scales that can be repeatedly assigned under keypoint localization: From the image above, it is obvious that we can't use the now an orientation is assigned to each keypoint to achieve invariance to image rotation. Feature detectors in opencv have wrappers with common interface that enables to switch easily between different algorithms solving the same problem. Feature detection and description ». We already know the scale at which the keypoint was detected (it's the same as the scale of the blurred image). The following video shows feature points detected by google arcore. Consider the region around each keypoint.
Related : Circle Scale Orientation Keypoints Feature Detector - How do we choose corresponding circles independently in each image?.